B
blog
Misafir
Misafir

Robot Operating System ya da kısaca ROS, robotik uygulamalarda kullanılan açık kaynaklı bir yazılım platformudur. ROS, robotların algılamasından kontrolüne kadar geniş bir yelpazedeki görevleri etkili bir şekilde yönetebilmek için tasarlanmış modüler bir sistem sunar. Geliştiricilere geniş bir araç seti ve standartlaştırılmış iletişim protokolleri sağlayarak, karmaşık robot sistemlerinin hızlı ve uyumlu bir şekilde entegre edilmesini mümkün kılar. Bu nedenle, ROS’un gömülü sistemlerde kullanılması, özellikle Jetson gömülü cihazları üzerinde, robotik uygulamaların geliştirilmesi ve optimize edilmesi için güçlü bir araç olarak dikkat çekmektedir.
Bu yazıda robotik projelerinde yoğun bir şekilde kullanacağınız ROS 2 Foxy sürümünü, NVIDIA Jetson ürünlerine nasıl kurabileceğinizi anlatacağız.
Neler Gerekli?
-
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
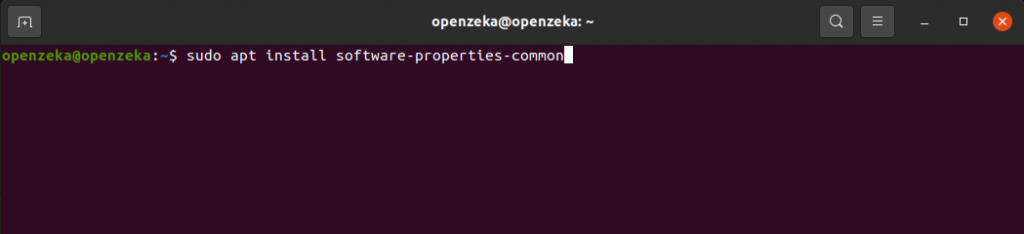
1- ROS 2 apt repository sisteminize aşağıdaki komutu kullanarak ekleyin.
Copy to Clipboard
sudo apt install software-properties-common
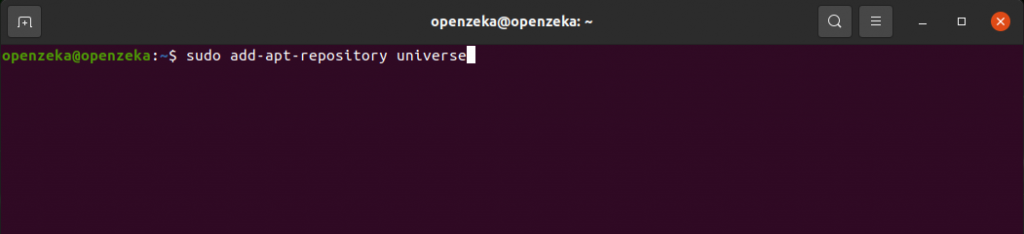
1.1- ROS 2 apt repository sisteminize aşağıdaki komutu kullanarak ekleyin.
Copy to Clipboard
sudo add-apt-repository universe
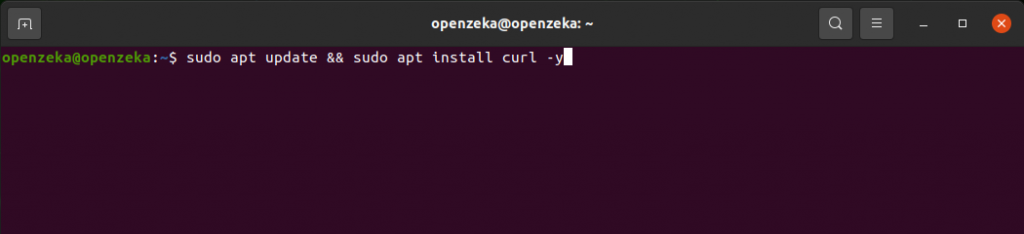
2 – Bir sonraki adımda kullanacağımız ROS 2 GPG anahtarını sisteme ekleme için curl aracının yüklü olması gerekiyor. Bu aracı sisteminize kurmak için aşağıdaki komutu kullanabilirsiniz.
Copy to Clipboard
sudo apt update && sudo apt install curl -y
3- Bu adımda ROS 2 GPG anahtarını curl aracını kullanarak sisteminize ekleyeceksiniz.
Copy to Clipboard
sudo curl -sSL
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
-o /usr/share/keyrings/ros-archive-keyring.gpg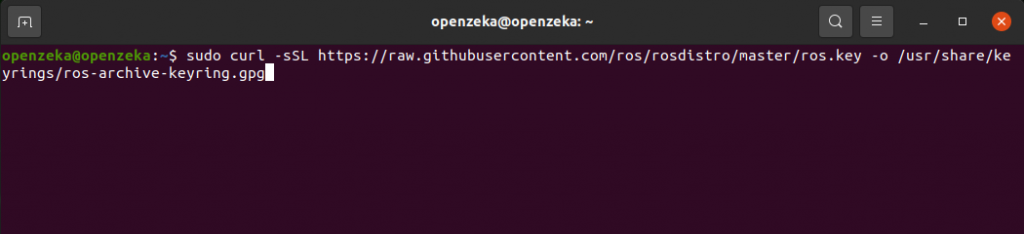
4- Önceki adımlarda indirdiğiniz repository’i sisteminizin kaynaklar listesine (sources list) ekleyin.
Copy to Clipboard
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg]
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
$(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null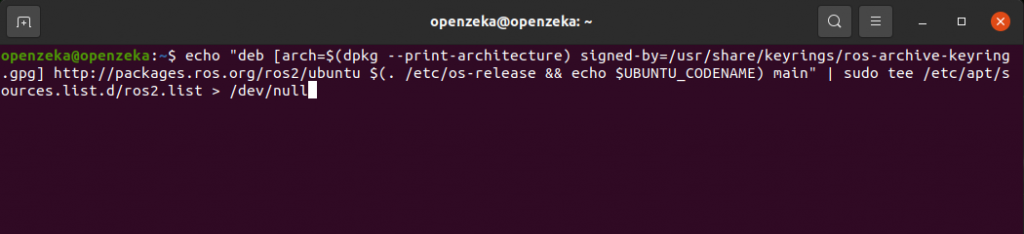
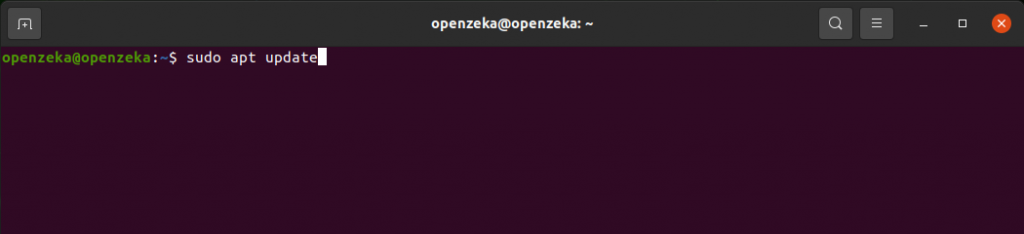
5 – Apt repository önbelleklerini, aşağıdaki komutu kullanarak güncelleyin.
Copy to Clipboard
sudo apt update
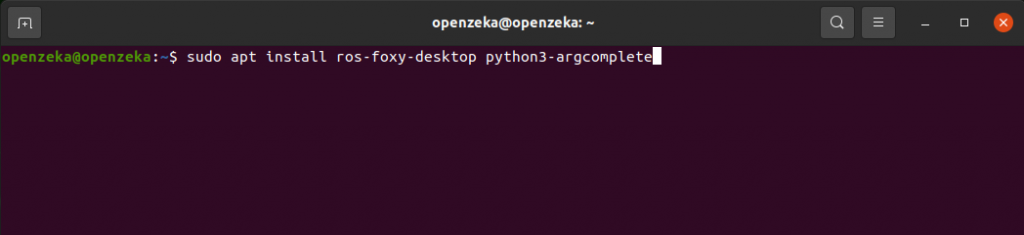
6 – Artık ROS kurulumuna geçiyorsunuz. Desktop Install (Recommended): ROS, RViz, demos, tutorials.
Copy to Clipboard
sudo apt install ros-foxy-desktop python3-argcomplete
7- Compilers ve ROS paketlerini oluşturmak için gereken geliştirici araçlarını aşağıdaki komutu kullanarak yükleyin.
Copy to Clipboard
sudo apt install ros-dev-tools
8 – Ros ile çalışmaya başlamadan önce çalışma ortamı (environment) ayarlaması yapmanız gerekiyor. Bu işlemi aşağıdaki komutu kullanarak yapabilirsiniz. Bu işlemi açtığınız her yeni terminalde yapmanız gerekiyor eğer yapmak istemiyorsanız bu komutu bashrc dosyasına eklemeniz yeterli olacaktır.
Copy to Clipboard
source /opt/ros/foxy/setup.bash
9 – Yaptığınız kurulumun doğruluğunu anlamak için bir örnek çalıştıracaksınız. Kısaca bahsedecek olursak; Ros 2 Foxy kullanarak C++ ile yazılmış sinyal gönderen (talker) bir kod ile python ile yazılmış bir dinleyici (listener) kod haberleştireceksiniz.
İlk önce açtığınız bir terminalde aşağıdaki komutları çalıştırın.
Copy to Clipboard
source /opt/ros/foxy/setup.bash ros2 run demo_nodes_cpp talker
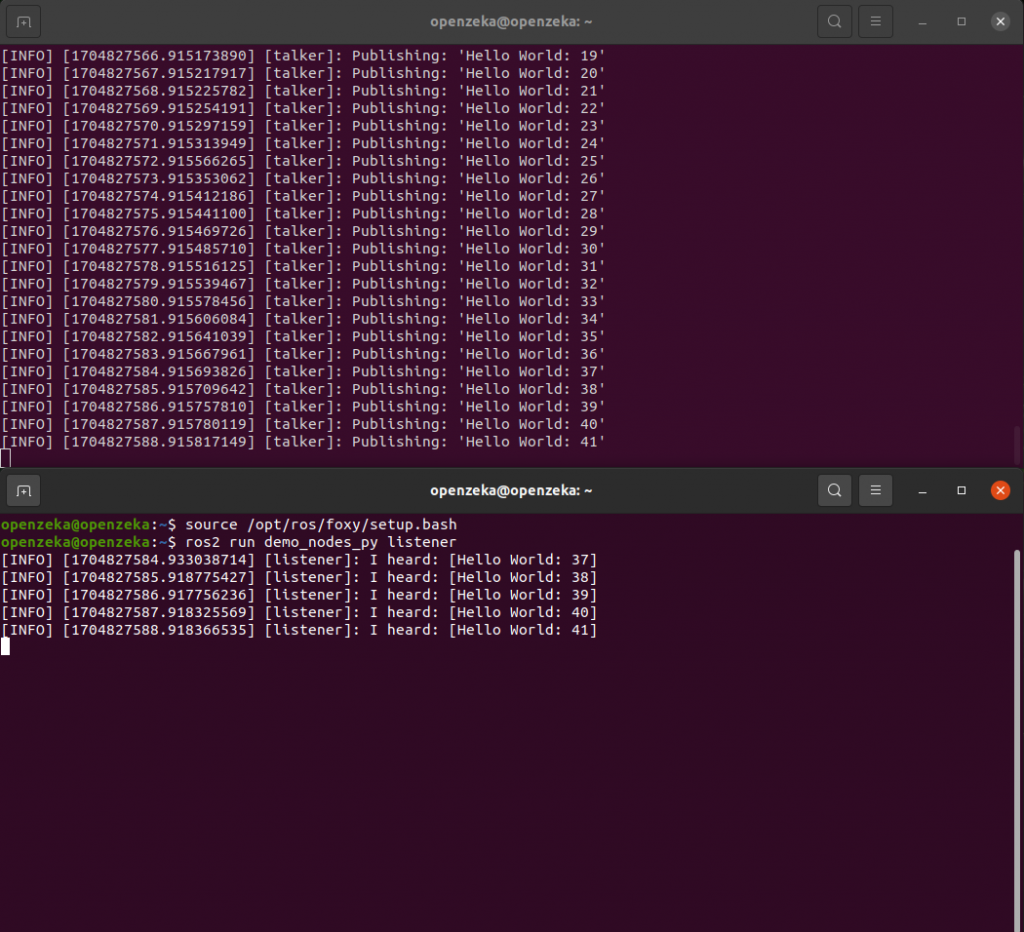
10 – Dinleyici kodunu aktive etmek için önce yeni bir terminal açın ve komutları çalıştırın. Aşağıdaki görüntüde iki terminal açık. Üstteki terminalde C++ ile yazılmış kod, Hello World mesajını iletirken, alttaki terminalde Python ile yazılmış olan kod, bu mesajı alarak içeriğini yazıyor. Buna benzer görüntü aldığınızda işlemi tamamlamış oluyorsunuz.
Copy to Clipboard
source /opt/ros/foxy/setup.bash ros2 run demo_nodes_py listener
Sizler de ROS ile robotik uygulamalar geliştirmeye hemen başlayabilirsiniz. ROS 2 destekleyen Jetson modellerine uygun fiyatlarla sahip olmak için
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
ziyaret edin.
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.