B
blog
Misafir
Misafir

Bu yazıda haritalama, konumlandırma ve yönlendirme projelerinde sıklıkla kullanılan RPLidar modellerinin kurulumunu anlatacağız.
Neler Gerekli?
-
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
-
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
1- İlk olarak rplidar sdk github reposunu indirin. Aşağıdaki komut ile bu işlemi yapabilirsiniz.
Copy to Clipboard
git clone
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
2- İndirmiş olduğunuz reponun adresine erişin. Eğer farklı bir isimlendirme yapmadıysanız varsayılan olarak rplidar_sdk şeklinde dosya oluşuyor.
Copy to Clipboard
cd rplidar_sdk/
3- SDK’nın kurulması için derlenmesi gereken dosyalar bulunuyor. Derleme işlemi için aşağıdaki komutu, rplidar_sdk klasörünün içinde çalıştırın.
Copy to Clipboard
make
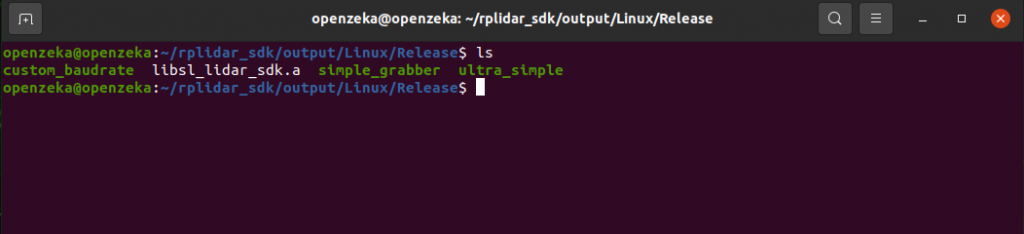
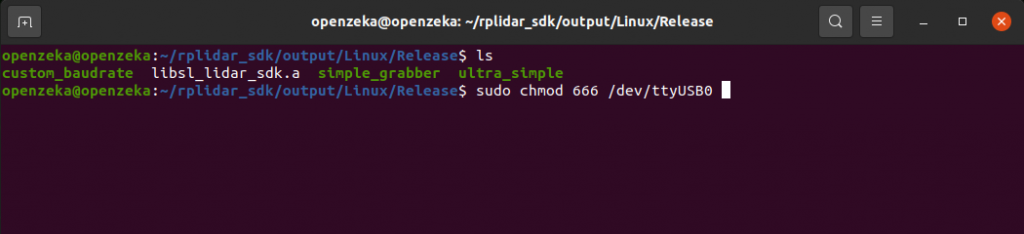
4- Derleme işleminden sonra lidarda çalıştıracağınız örnek kodlar da oluşuyor. Bunun için önce Release dosyasına ulaşın sonra derleme işleminin doğru tamamlandığını öğrenmek için “ls”komutunu çalıştırın. Dosya içeriğinin aşağıdaki gibi olması gerekiyor.
Copy to Clipboard
cd output/Linux/Release ls
5- Örnek kodu çalıştırmadan önce, USB’den veri okuma izninin verilmesi gerekiyor. Bu izin işlemini aşağıdaki gibi komutu çalıştırarak verebilirsiniz.
Copy to Clipboard
sudo chmod 666 /dev/ttyUSB0
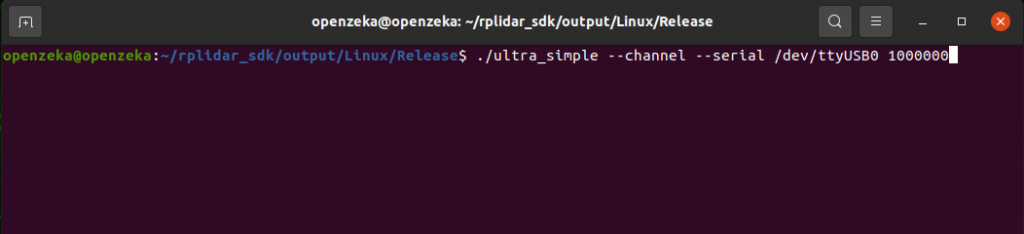
6- USB’den veri okuma izni verildikten sonra artık örnek uygulamayı çalıştırabilirsiniz. Buradaki 1000000, rplidar S3’ün baudrate’i. Biz RPLidar S3 kullandığımız için bu değeri yazdık. Buraya kullandığınız lidar modeline uygun baudrate değerini, aşağıdaki tablodan faydalanarak yazabilirsiniz.
Copy to Clipboard
./ultra_simple --channel --serial /dev/ttyUSB0 1000000
Lidar Modeli | Baudrate |
|---|---|
RPLidar A1M8 | 115200 |
RPLidar S1 | 256000 |
RPLidar S2 | 1000000 |
RPLidar S3 | 1000000 |
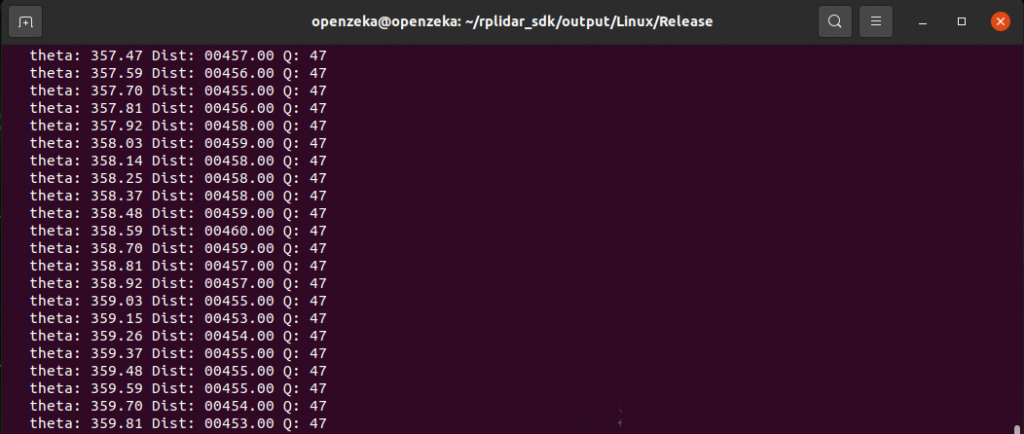
7- Örnek kodu çalıştırdıktan sonra terminalinizde veriler akmaya ve lidar çalışmaya başlayacak. Lidarı oynatarak değerlerin değiştiğini, gerçek zamanlı olarak ölçüm yapıldığını görebilirsiniz.
Kurulumunu anlattığımız RPLidar modellerini uygun fiyata almak için mağazamızı
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
ziyaret edebilirsiniz.RPLidar’ı Jetson ile birleştirerek birçok robotik uygulaması geliştirebilirsiniz.
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.
RPLidar ile beraber kullanabileceğiniz Jetson modellerine uygun fiyata ulaşabilirsiniz.
Bu bağlantıyı görüntüleyebilmek için kayıt olmalı zaten üyeyseniz üye girişi yapmalısınız.